|
一、 主要技术参数:
1、交流带减速器电机机率:90W 输入电压:220V 50/60HZ 电机转速:1350rpm
输出转速:10r/min
2、光栅角位移传感器1个:GFJ-7-5V/1000P,转速:1000栅/转;
3、直线位移传感器一个:WYDC-200L,量程L=200mm,精度:0.1%;
4、连杆在130-320mm范围内有级可调; 安装孔间距:24mm
导杆在220-270mm范围内有级可调; 安装孔间距:24mm
摇杆在155-220mm范围内有级可调; 安装孔间距:24mm
5、带传动 传动比为1:1.5;
6、链传动 传动比为1:1;
7、齿轮有三种:m=2 Z1=25 Z2=75 Z3=100
8、外形尺寸:1200×600×780mm;
9、重量:85kg
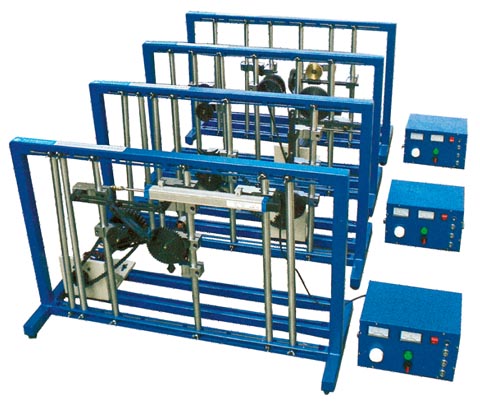
YYJX-JGYD-B型平面机构运动方案创新设计试验台
二、 基本配置:
1、该实验台主要由机架、电机、带传动装置和一个规范化零件库(零件箱)组成,零件库内配备有各种基本杆组、回转副、移动副、凸轮、槽轮、齿轮、齿条以及联接件等共计50种80多个规格。运动构件有杆组、凸轮、槽轮、棘轮、齿轮、齿条等。
2、传动装置:采用带传动和链传动两种,中心距在100-600mm之间;
3曲柄有两种:一种采用铰接形式,曲柄长在30-60mm范围内有级可调;另一种采用固定支承座与横梁连结形式,曲柄长在30-50mm范围内无级可调;
4、不完全齿轮传动采用整体式结构,主动轮工作齿数为11齿,运动周期为1/4,运动输入、输出为转动形式;
5、凸轮机构:采用等速凸轮(可选配其它凸轮),Hmax=15mm,配有尖顶和滚子两种顶尖,顶杆采用力封闭方式;
6、棘轮机构:采用齿式外啮合结构,主动棘爪为1,止回棘爪为1,棘轮齿数为20,棘爪与一连杆固结,主动杆摆角可调最大跨齿度4个;
7、槽轮机构:采用外槽轮机构,槽轮槽数Z=4,主动销n=1;运动输入、输出为转动形式
8、齿轮齿条机构:采用整体结构,主动齿轮的摆角可调,齿轮齿数Z1=100,齿条齿数Z2=66;
9、电动机、机架各1个,光栅角位移传感器1个、直线位移传感器1个,
齿轮、各种转动副、移动副库等;
并提供以下18种拼装方案:
(1).曲柄摇杆机构 ( 2).曲柄导杆摇杆机构
(3).曲柄对心滑块机构 ( 4) .曲柄偏心滑块机构
(5).曲柄导杆对心滑块机构 (6) 曲柄导杆偏心滑块机构
(7).凸轮机构 (8)槽轮机构
( 9).齿轮-曲柄摇杆-棘轮机构 (10).链-齿轮传动
( 11).曲柄摇杆-齿轮齿条机构 (12).不完全齿轮机构
( 13).齿轮-曲柄摇杆机构 (14).齿轮-曲柄导杆对心滑块机构
(15)齿轮-曲柄导杆偏心滑块机构 (16).齿轮-曲柄滑块(牛头刨床)机构
(17.)齿轮-导杆摇杆机构 (18)插齿机机构
10、机电控制及测试数据采集系统一套,配套教学专用软件一套,随机工具一套
三、 实验内容:
1、机构系统创新拼装设计实验:可灵活拼装18种以上各种平面传动机构,拼装的机构能保证配合精度,运动灵活,无卡滞和干涉现象;
2、基本平面机构运动参数可视化分析实验:可检测各种平面机构活动构件的位移、速度和加速度,并通过计算机显示运动曲线;通过对构件运动曲线的分析可了解机构运动规律及机构运动状况,进而对机构进行重新设计与装配调整;
3、课外活动中的机构创新实验:利用该机械平台使用者可自行设计增添构件拼装新的机构。
四、 性能特点:
1、模块化设计、可利用基本构件库创新设计并拼装成多种平面机构系统。启发学生创新思维和培养动手能力;
2、可检测任意机构活动构件的运动规律和进行机构分析;
3、可利用实验台配套软件对杆机构及凸轮机构进行虚拟设计和运动曲线模拟;
4、测试与机械部分相分离,干扰少,便于维护;
5、测试系统采用先进的单片机测试方式,以串口通讯,测试数据精度高、速度快、性能稳
定;
6、在机械及软件结构设计时考虑到了开放性的特点,为用户增添新的功能提供了方便。
7、计算机全程控制(全自动)或手动控制设备的启停、加减速、数据采集,实时显示运动参数和变化曲线,数据可生成EXCEL表格、可保存、打印、远程转输等。
五、检测控制系统及教学分析软件内容和特点:
1、检测控制系统以AVR系列单片机组为核心,配有放大、滤波、抗干扰电路实现数据采集、放大、初步处理和数据通讯,以及电机控制等功能,该系统利用串口实现数据采集箱和电脑之间的信息通讯;
2、该实验台教学分析软件以Vb为开发平台,包括实验内容介绍、实验录像、运动参数可视化分析、实验结果分析等内容;可对四杆机构、曲柄摇杆、曲柄滑块、曲柄导杆摇杆、曲柄导杆滑块上进行虚拟机构设计(参数可以通过对话框输入),并对连杆上的点的运动轨迹进行分析以及虚拟运动;凸轮机构有八种不同种类的凸轮,可转动,并可改变基圆半径、升程角、磙子半径;还有槽轮机构、棘轮机构等。
3、可对杆机构和凸轮机构进行虚拟设计和运动仿真;
4、使用实验教学软件进行实验指导以适应开放性实验教学需要。既方便教师指导,又达到学生自己动手操作的目的。
六、造型及表面处理:
1、大气美观、实物感强、加工精细;
2、金属外露件镀铬、其他表面防锈处理加喷塑;
3、喷塑表面平整、光滑、清洁无划痕和脱落斑点。
七、随机赠送:机构创新虚拟软件一套
1)12种运动副拼装方案、
2)14种工程机械原理拼装方案、
3)21种平面机构运动仿真动画、
4)9种三维机构运动仿真动画、
5)拆卸分解过程爆炸演示。
|
 公司邮局
公司邮局  联系我们
联系我们